Tête fer
Générateur
Nettoyage
JCAT Comet
JCAT Lyra
JC3
JS Scara
LCAT EVO
LCAT NEO
Dévideur fil
Options
Pannes fer
Fers manuels
![]() Brochure JC-3 séries (Anglais)
Brochure JC-3 séries (Anglais)
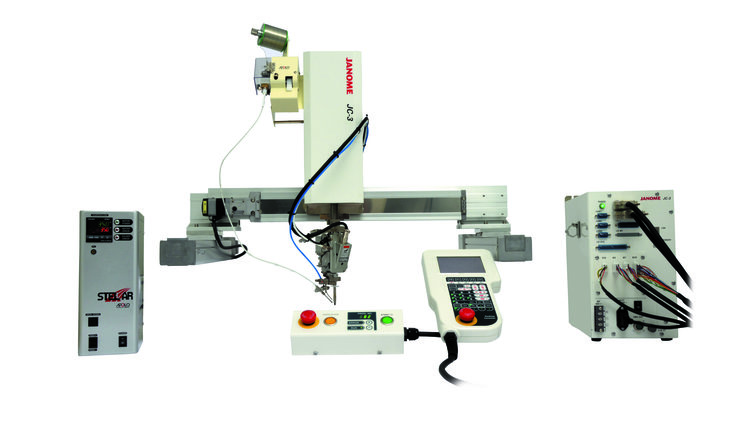
Le robot cartésien 4 axes
multi-fonctionnel de la série JC-3 est livré avec un
contrôleur et une unité robotisée dédiés,
faciles à utiliser, avec un large choix de longueurs de course pour
chaque axe.
Comme un robot de table, le JC-3 est prévu pour être facilement
utilisable.
L'apprentissage du programme est facilité par l'utilisation du
boîtier
déporté.
| Type |
JC-3A00-0T3
(tenue 1 coté) |
JC-3A00-0H3
(tenue 2 cotés) |
JC-3B01-0H4
(tenue 2 cotés) |
||||
|---|---|---|---|---|---|---|---|
|
Zone utile (mm, LxPxH)
|
195x190x35
|
295x315x90
|
395x395x82
|
||||
|
Courses
|
Axe X (mm)
|
200/300/400/500/600 | 300/400/500/600 | 300/400/500/600 | |||
|
Axe Y (mm)
|
200/300
|
300/400/500
|
300/400/500
|
||||
|
Axe Z (mm)
|
50/100/150/200
|
50/100/150/200
|
100/150
|
||||
|
Axe rotation
|
-
|
-
|
±360° | ||||
|
Commandes d'axes
|
Type |
Moteurs pas à pas
|
|||||
|
X, Y Axes
|
Contrôle boucle fermée
|
||||||
|
Axe Z
|
Contrôle boucle fermée
|
Contrôle boucle ouverte
|
|||||
|
Axe rotation
|
-
|
- | |||||
|
Charge maximum (kg)
|
4 | 8 | 3 | ||||
|
Vitesse maximum
<PTP Movement> |
Axe X (mm/s)
|
200
300 400 |
500
600 |
300
400 |
500
600 |
300
400 |
500
600 |
| 700 | 800 | 700 | 800 | 700 | 800 | ||
| Axe Y (mm/s) | 800 | ||||||
| Axe Z (mm/s) | 400 | ||||||
| Axe rotation (deg/s) | - | - | 900 | ||||
|
Axe rotation Moment d'inertie acceptable (kg/cm2)
|
- | - | 90 | ||||
|
Repétabilité
|
Axes X, Y (mm)
|
±0.02 | |||||
|
Axe Z (mm)
|
±0.02 | ±0.02 | ±0.01 | ||||
|
Axe rotation (deg)
|
- | - | ±0.008 | ||||
|
Méthode de commande
|
PTP (contrôle point par point), CP (contrôle continu)
|
||||||
| Interpolation |
Ligne 3-Dimensions et interpolation d'arc
|
||||||
|
Méthode d'apprentissage
|
Apprentissage à distance (JOG), Entrée manuelle des
données (MDI)
|
||||||
|
E/S externes
|
E/S-SYS: 16 entrées / 16 sorties; E/S-1: 8 entrées / 8 sorties;
E/S-MT (Optionnel) : pour les axes auxiliaires (type d'entrée de chaîne d'impulsions * 8), commande jusqu'à 2 axes Fieldbus (Optionnel): Choisir CC-Link / DeviceNet / PROFIBUSCOM; Port (RS232C): COM1, COM2, COM3 (pour le contrôle de périphérique externe) EMG OUT: Pour la connexion de circuit de sécurité externe MEMORY: Pour la connexion de mémoire USB LAN: Pour la connexion PC via Ethernet SWITCHBOX (Facultatif): Connecteur de boîtier de commutation dédié |
||||||
|
Alimentation
|
AC 90~240V (monophasé) 50/60 Hz
+ DC48V externe (en fonction de vos disponibilités) |
||||||